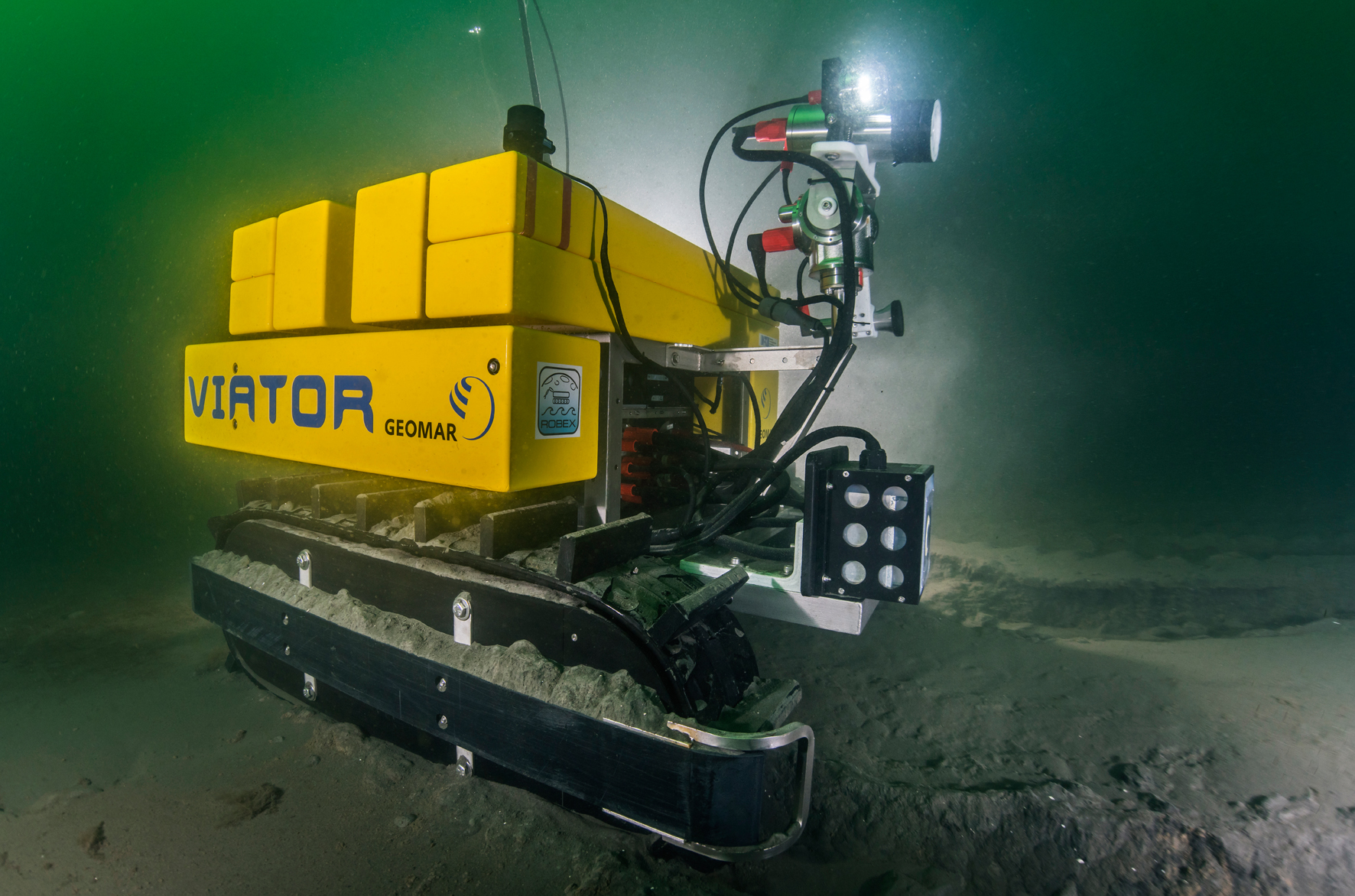
The underwater crawler VIATOR pushes itself across the seabed and maps the area with the help of a camera system and a laser scanner. It is completely autonomous. Photo: Christian Howe/Submaris
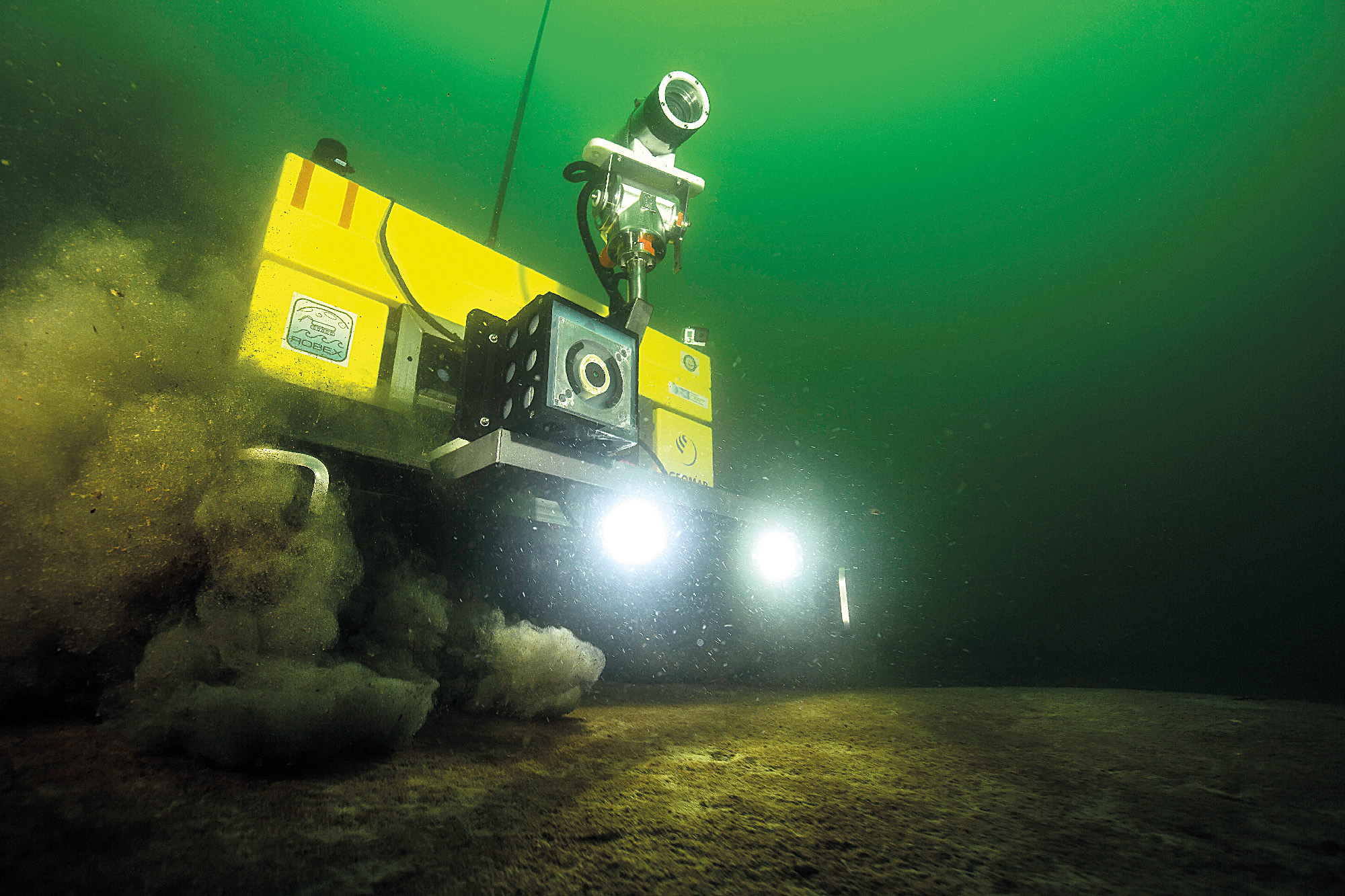
On the seafloor, VIATOR can make visual observations as well as measurements of physical values such as pressure, temperature, salinity and turbidity, and bigeochemical factors such as pH, oxygen, carbon dioxide, methane and chlorophyll in its environment. Photo: Uli Kunz/Submaris
Deployment of the MANSIO-VIATOR system from onboard the research vessel ALKOR during the ARCHES expedition 2020. Photo: Sascha Flögel/GEOMAR
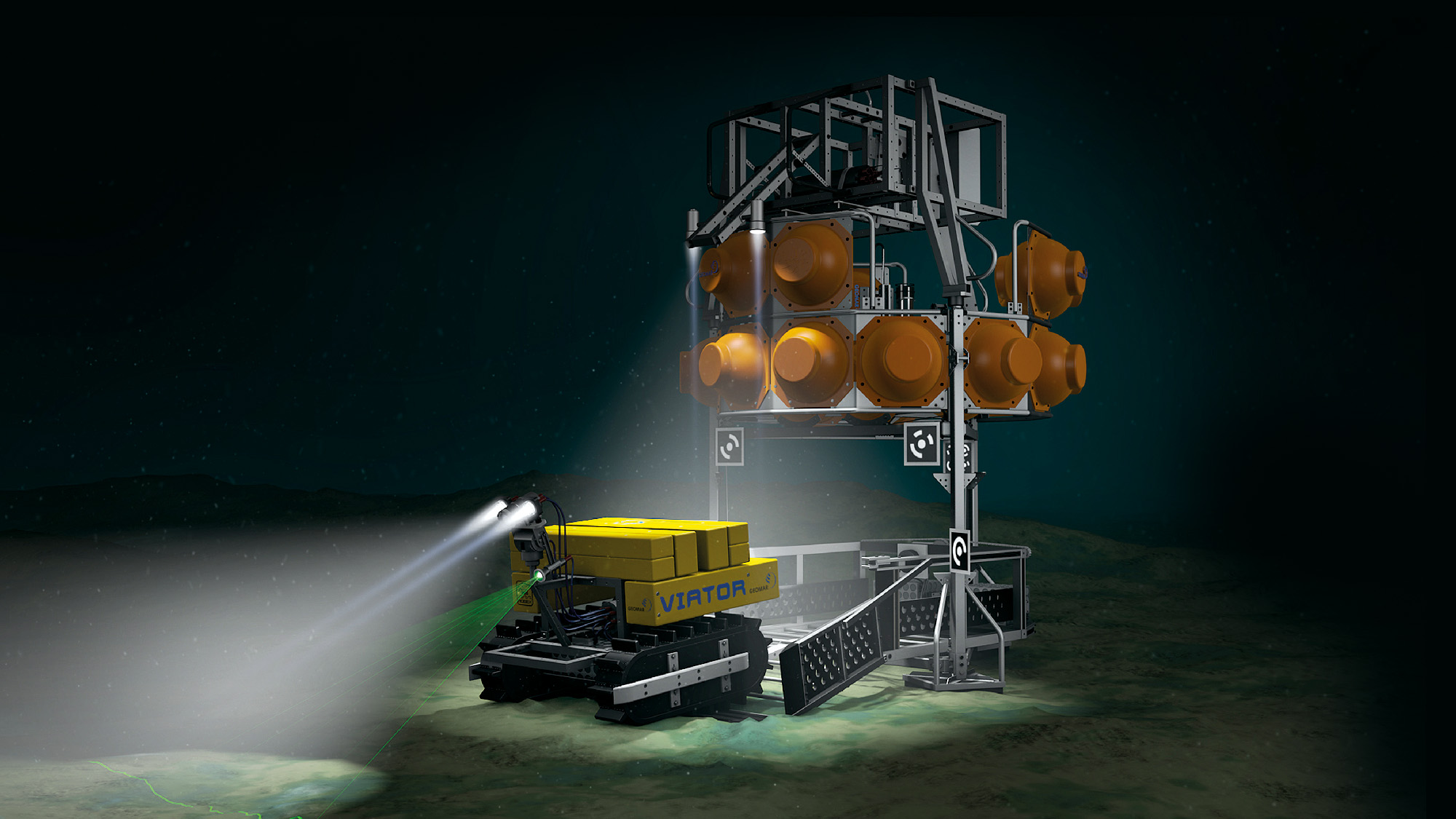
The MANSIO lander is anchored on the seafloor. Regular measurements will be taken from its sensors. It will also serve as a hangar for VIATOR to dock for data and power exchange. Graphic: C.C. Meyer
The MANSIO-VIATOR System - Space Meets Deep Sea
In order to expand the application possibilities of autonomous deep-sea crawlers, the MANSIO-VIATOR system is being developed at GEOMAR. In contrast to existing solutions, it does not require a fixed cable connection for power supply and data transmission. The system is being developed as part of the Helmholtz Alliance Robotic Exploration under Extreme Conditions (ROBEX), which brings together space and deep-sea research.
After the system is set down on the seafloor, the crawler VIATOR (lat.: the traveler) is able to operate autonomously in a given terrain and then dock at its central station MANSIO (lat.: the hostel) to exchange data and energy. First, VIATOR creates a terrain map of its surroundings, based on its own camera recordings and in connection with the central station. This then serves as the basis for regular and repeated measurements of physical and biogeochemical parameters or the observation of marine communities and geological structures. The maximum deployment depth is 6,000 meters, and VIATOR's maximum range is 10 kilometers.
In 2020, VIATOR and MANSIO were involved in an expedition in the Eckernförde Bay. During the expedition, the communication and cooperation of different components of an autonomous marine measurement network was tested. In addition, it was investigated how the entire system reacts autonomously to environmental changes. The expedition is part of the Helmholtz Future Project ARCHES, in which autonomous and networked robotic systems for marine and planetary environmental exploration have been jointly developed since 2018. In addition to GEOMAR, the German Aerospace Center (DLR) (coordinator), the Alfred Wegener Institute (AWI) and the Karlsruhe Institute of Technology (KIT) are involved in the project.