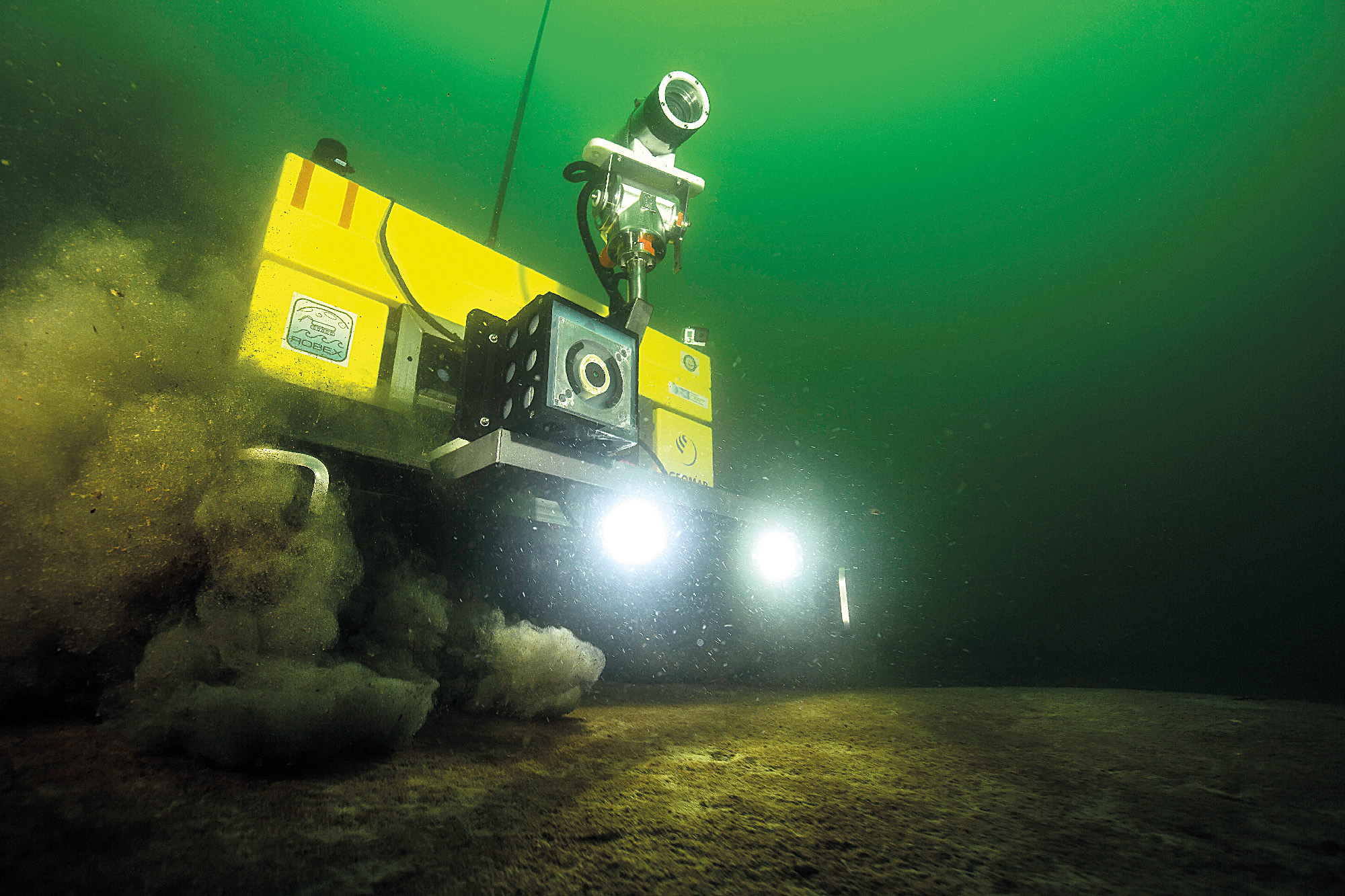
Der Unterwasser-Crawler VIATOR bewegt sich über den Meeresboden und kartiert mithilfe eines Kamera-Systems und eines Laser-Scanners das Gebiet. Dabei ist er völlig autonom unterwegs. Foto: Christian Howe/Submaris
Am Meeresboden kann VIATOR neben visuellen Beobachtungen auch Messungen physikalischer Werte wie Druck, Temperatur, Salzgehalt und Trübe sowie bigeochemischer Faktoren wie pH-Wert, Sauerstoff, Kohlendioxid, Methan und Chlorophyll in seiner Umgebung vornehmen.
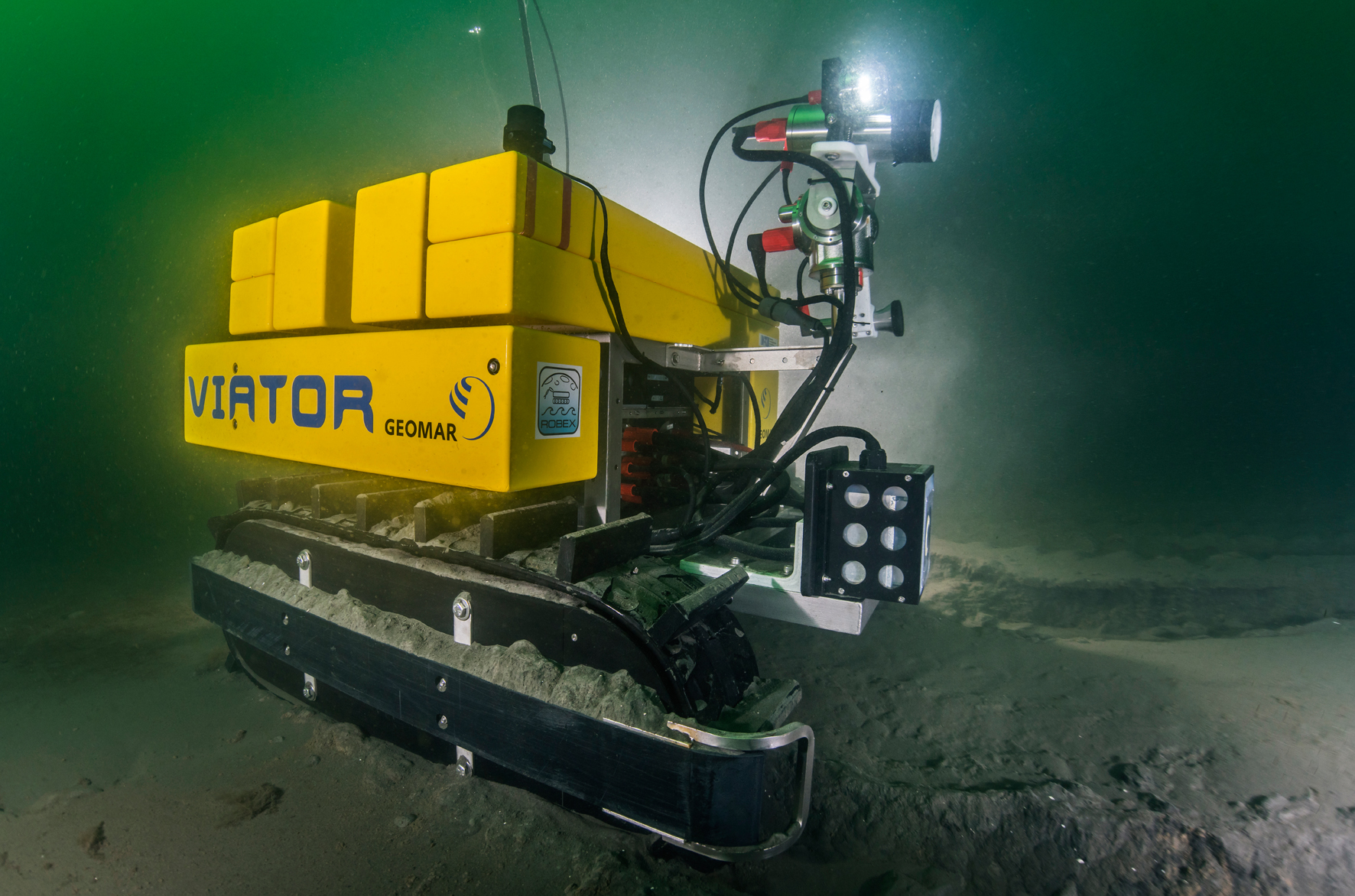
Foto: Uli Kunz/Submaris
Aussetzen des MANSIO-VIATOR Systems von Bord des Forschungsschiffs ALKOR während der ARCHES- Expedition 2020. Foto: Sascha Flögel/GEOMAR
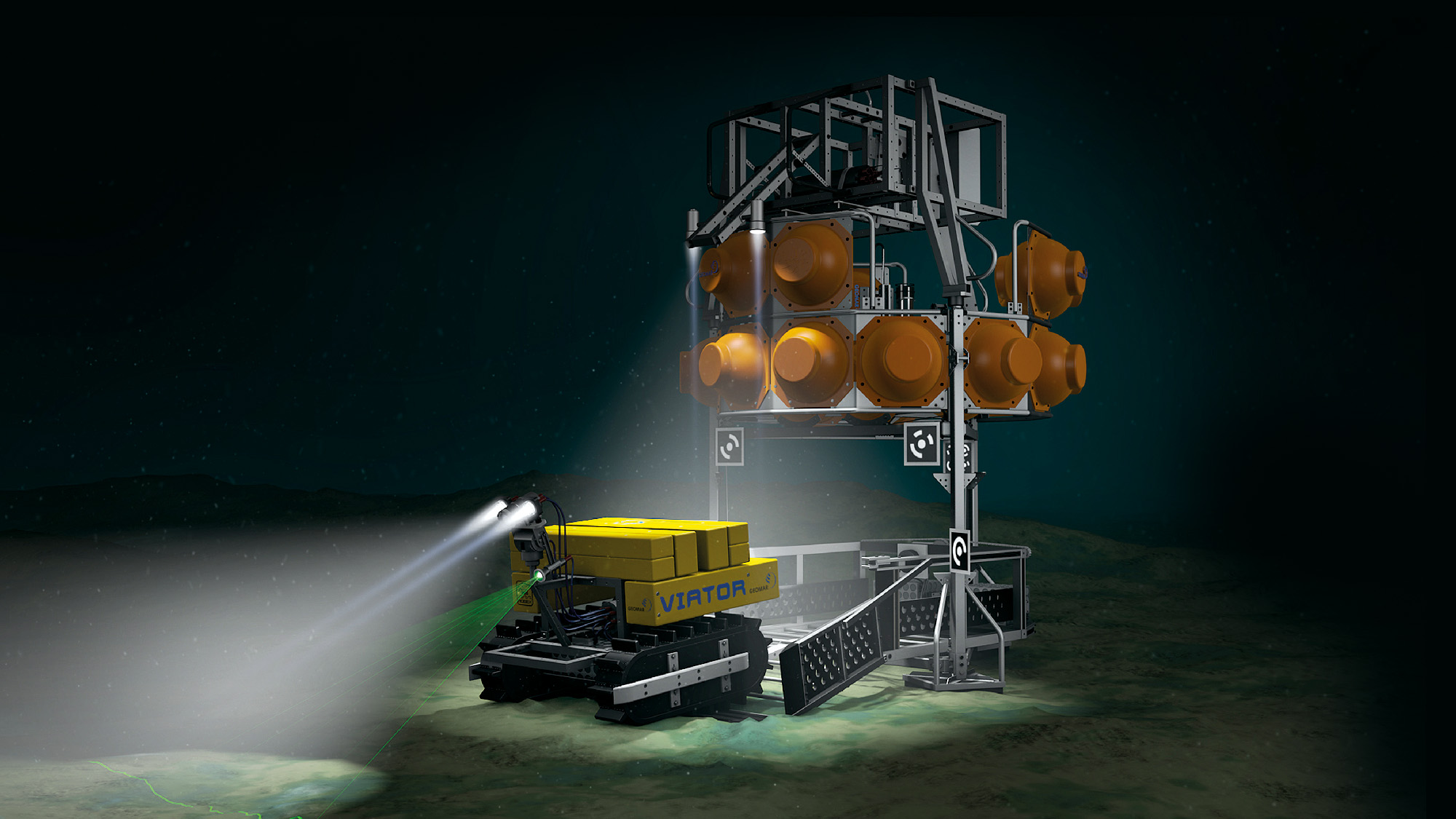
Der Lander MANSIO wird auf dem Meeresboden verankert. Von seinen Sensoren werden regelmäßig Messungen durchgeführt. Außerdem dient er VIATOR als Hangar, um dort zum Austausch von Daten und Energie anzudocken. Grafik: C.C. Meyer
Das MANSIO-VIATOR System - Weltraum trifft Tiefsee
Um die Einsatzmöglichkeiten von autonomen Tiefsee-Raupenfahrzeugen, sogenannten Crawlern, zu erweitern, wurde am GEOMAR das MANSIO-VIATOR System entwickelt. Es benötigt im Gegensatz zu existierenden Lösungen keine feste Kabelverbindung für die Energieversorgung und die Datenübertragung. Das System wurde im Rahmen der Helmholtz-Allianz Robotische Exploration unter Extrembedingungen (ROBEX) realisiert, die Raumfahrt- und Tiefseeforschung zusammenbrachte.
Nachdem das System am Meeresboden abgesetzt wird, ist der Crawler VIATOR (lat.: der Reisende) in der Lage, selbständig in einem vorgegebenen Terrain zu operieren, um anschließend an seiner Zentralstation MANSIO (lat.: die Herberge) zum Austausch von Daten und Energie anzudocken. Zunächst erstellt VIATOR, basierend auf eigenen Kameraaufnahmen und in Verbindung mit der Zentralstation, eine Terrainkarte der Umgebung. Diese dient dann als Grundlage für regelmäßige und wiederholte Messungen physikalischer und biogeochemischer Parameter oder der Beobachtung mariner Lebensgemeinschaften und geologischer Strukturen. Die maximale Einsatztiefe beträgt 6.000 Meter, die Reichweite des VIATOR beträgt maximal 10 Kilometer.
2020 waren VIATOR und MANSIO an einer Expedition in der Eckernförder Bucht beteiligt. Während der Ausfahrt wurde die Kommunikation und Zusammenarbeit verschiedener Komponenten eines autonomen marinen Messnetzwerks erprobt. Außerdem wurde untersucht, wie das gesamte System selbstständig auf Umweltveränderungen reagiert. Die Expedition gehörte zum Helmholtz-Zukunfts-Projekt ARCHES, in dessen Rahmen von 2018 bis 2022 autonome und vernetzte robotische Systeme zur marinen und planetaren Umwelterkundung gemeinsam entwickelt wurden. Am Projekt waren neben dem GEOMAR das Deutsche Luft- und Raumfahrtzentrum (DLR) (Koordinator), das Alfred-Wegener-Institut (AWI) und das Karlsruher Institut für Technologie (KIT) beteiligt.