



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leitung:
Dr. Johannes Karstensen
GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel
Wischhofstr. 1-3
24148 Kiel
Tel.: +49 431 600 4156
Karstensen, Johannes
Diese Seite wird gerade überarbeitet.
Weiterführende Informationen: https://ieeexplore.ieee.org/document/10337372
Melden Sie sich gerne bei uns, wenn Sie weitere Fragen zu BELUGA haben.
Technische Anfragen: Patrick Leibold
Daten und Kampagnen: Sylvia Reißmann
BELUGA ist ein System zur Anzeige und Überwachung von Plattformen und deren Messdaten bei Einsätzen auf See in Echtzeit. Über eine Benutzeroberfläche (BELUGA Navigator) werden von den Plattformen empfangene Daten mit Positionen dargestellt. Dabei können Daten direkt an Bord angezeigt, sowie zusätzlich in einer online einsehbaren Oberfläche in nahezu Echtzeit verfügbar gemacht werden. Neben der Visualisierung von Daten kann über BELUGA mit Plattformen über und unter Wasser kommuniziert werden.
Die Funktionalitäten von BELUGA werden im Abschnitt Funktionen genauer erläutert.
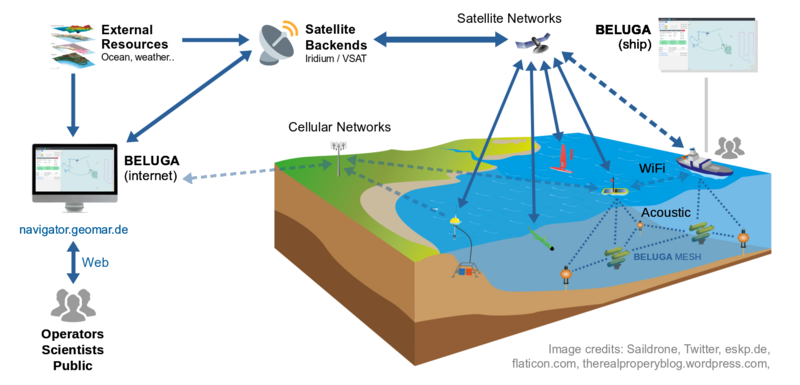
Abbildung 1 zeigt die verschiedenen Datenflüsse, die innerhalb des BELUGA Systems genutzt werden können. Je nach Plattformen und Einstellungen werden unterschiedliche Kommunikationskanäle genutzt. Während bei einem Einsatz auf See oft akustisch oder per WLAN mit eingesetzten Plattformen kommuniziert wird, senden andere Plattformen, die länger im Wasser bleiben, ihre Daten auch über Satellite. Neben der Anzeige der eingegangenen Daten direkt an Bord, in der Grafik dargestellt als BELUGA (ship), können die Daten zusätzlich in der öffentlich erreichbaren Version der Benutzeroberfläche, hier: BELUGA (internet), visualisiert werden. Auch die Darstellung von Daten ausschließlich in der öffentlichen Version, ohne lokales BELUGA Netzwerk an Bord, ist möglich. Zusätzlich können externe Daten, die über das Internet abgerufen werden, sowohl lokal als auch öffentlich angezeigt werden.
Die Funktionalitäten von BELUGA lassen sich in die Bereiche "Überwachung und Steuerung von Plattformen", "Datenvisualisierung" und "Öffentlichkeitsarbeit" einteilen.
Zusätzlich zu dem jeweils bei den Einsätzen vor Ort genutzten System, gibt es eine öffentliche Version des BELUGA Navigators, die online einsehbar ist.
Diese ist zu erreichen unter: https://beluga.geomar.de
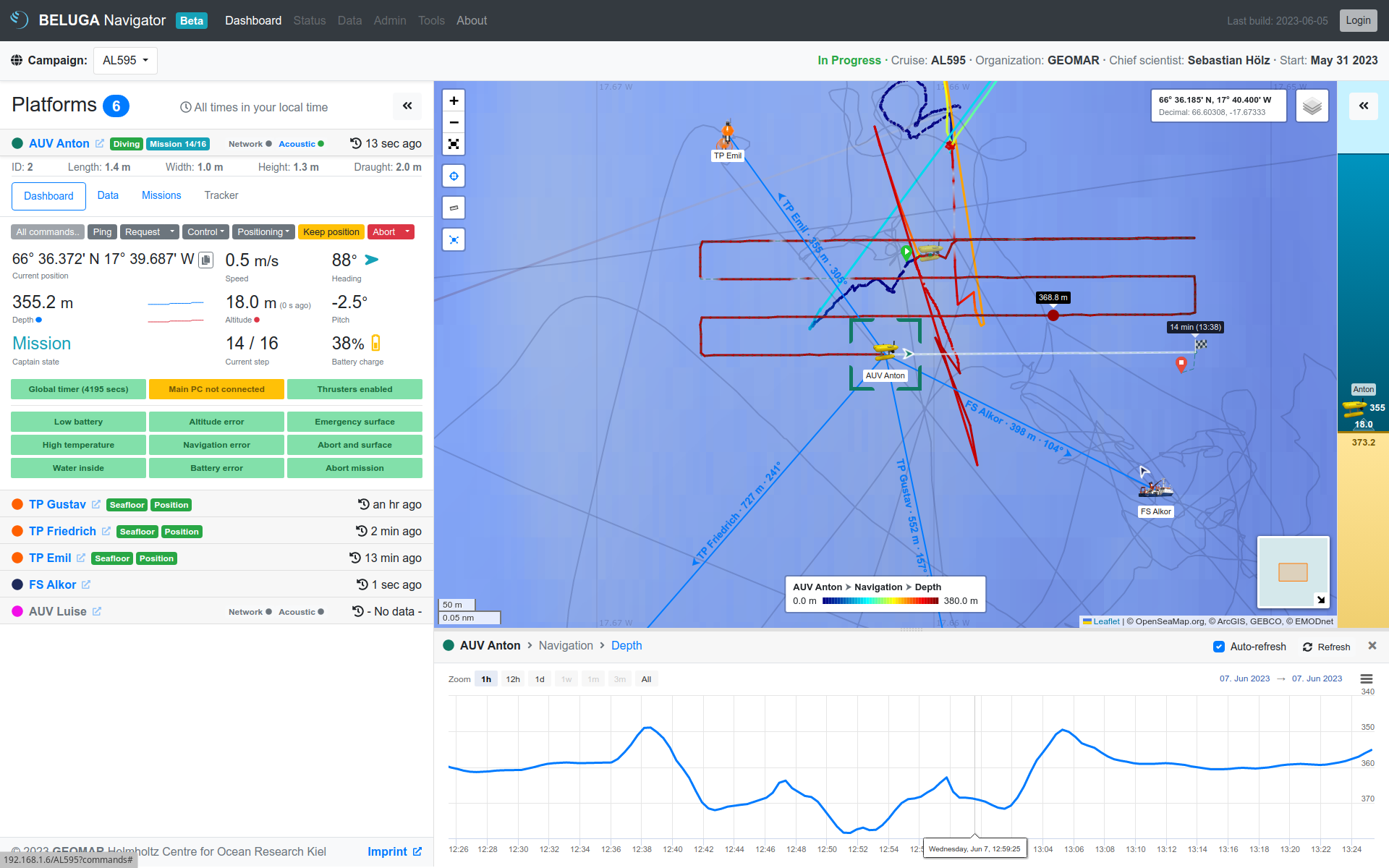
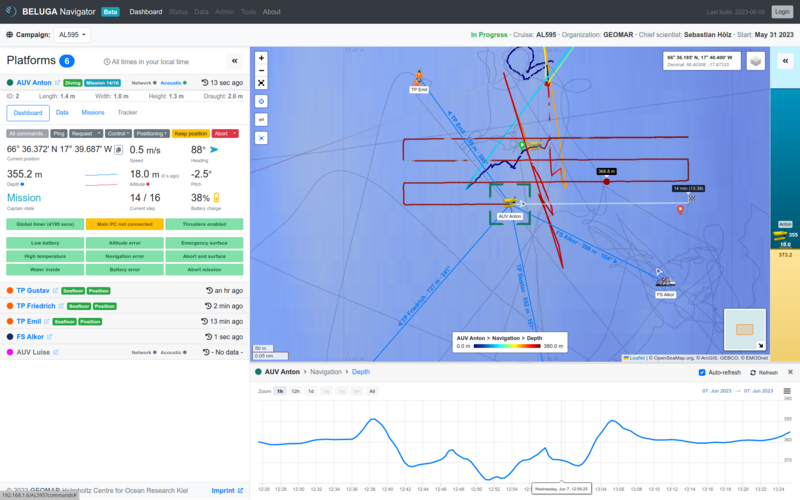
Die Benutzeroberfläche von BELUGA ist sowohl online als auch im lokalen System die selbe. Sie ist als Webanwendung aufgebaut und kann über einen beliebigen Browser geöffnet werden. Die Website besteht aus mehreren Komponenten, wovon einige nach Bedarf erscheinen und verschwinden. Neben einer Navigationsleiste am oberen Fensterrand, befindet sich auf der linken Seite immer eine Liste mit Plattformen, während der mittlere und rechte Bereich des Fensters von einer Karte eingenommen wird. Zusätzliche Komponenten erscheinen am rechten und unteren Rand des Fensters. Im Folgenden werden alle Komponenten des BELUGA Navigators beschrieben. Eine erste Übersicht kann in Abbildung 2 gefunden werden.
In diesem Abschnitt wird auf die für die Kommunikation im lokalen BELUGA Netzwerk genutzten und Integrierten Schnittstellen und Geräte eingegangen. Im lokalen BELUGA System ist nicht nur die Anzeige von Daten, sondern auch das Senden von nachrichten an dei Plattformen möglich. Plattformen, die ihre Daten über Sattelitenverbindungen an einen Server schicken, von dem aus die in das BELUGA System gelangen und angezeigt werden können, werden hier nicht berücksichtigt, da diese Kommunikationswege je nach Art der Plattform unterschiedlich sind, alle Daten aber in einer Datenbank des GEOMAR Datenmanagement zusammenlaufen, von wo BELUGA sie abholt. Anschließend wird auf das Protokoll für die lokale Kommunikation eingegangen.
Um ein lokales BELUGA System zu nutzen, kommt eine Shipboard-Konsole mit der Hardware für das System zum Einsatz. Diese beinhaltet unter Anderem zwei Rechner, auf denen BELUGA selbst und zusätzliche Module laufen. Neben einem Router ist auch ein Datenspeicher Teil des Systems. BELUGA entscheidet selbstständig, welcher der zur Verfügung stehenden Kommunikationskanäle genutzt wird, um eine Nachricht an eine Plattform zu senden. Kommunikation ist aktuell über die Schnittstellen möglich:
Die Kommunikation im lokalen BELUGA System basiert auf Nachrichten im DCCL Format. Es werden unabhängig von der genutzten Schnittstelle die selben Nachrichten versendet.
Ein Bereich von BELUGA ist die Navigation unter Wasser. Aktuell wird hier für und mit den autonomen Unterwasserfahrzeugen (AUVs) des GEOMAR entwickelt und getestet.
Der Fokus liegt dabei zur Zeit auf einer Verbesserung der AUV-Navigation während Missionen. In diesem Bereich werden sowohl USBL-Positionierung als auch LBL-Ranging untersucht, wobei im Einsatz bisher vorwiegend mit USBL-Positionierung gearbeitet wird.
Beide Techniken werden im Folgenden vorgestellt:
Über das akustische USBL-Modem von Evologics kann die Position einer Plattform unter Wasser bestimmt werden. Dazu schickt das USBL-Modem am Schiff ein Signal an das Modem der Plattform, dessen Position bestimmt werden soll und das Modem an der Plattform antwortet auf die Nachricht. Basierend auf der Richtung, aus der die Antwort kam und der Zeit, die seit dem Senden des Signal vergangen ist, kann dann die Position der Plattform berechnet werden. Diese Positionsbestimmung durch "anpingen" eines Modems ist für alle Plattformen, die über ein Evologicsmodem für den passenden Frequenzbereich verfügen, möglich.
Das BELUGA System an Bord erhält die Informationen vom Modem und sendet dann die berechneten Positionen nach einer Plausibilitätsprüfung, bei der ausreißende Positionen rausgefiltert werden, an die jeweilige Plattform. Die AUVs können die empfangene Positionsinformation an ihre interne Navigationseinheit weiterleiten, was eine Stützung der AUV-Navigation, insbesondere wenn keine anderen Navigationsinformationen zur Verfügung stehen, erlaubt.
Auch diese Technik basiert auf den akustischen Modems und wird von allen Evologics Modems unterstützt. Ähnlich wie bei der Positionierung über USBL, wird vom Modem ein Signal ausgesendet und die Zeit bis zur Antwort gemessen. Anders als das am Schiff genutzte USBL-Modem, sind einfachere Modems, wie sie an den AUVs genutzt werden, nicht USBL-fähig. Sie können also nicht bestimmen, aus welcher Richtung ein akustisches Signal kam. Aus diesem Grund kann basierend auf dem Antwortsignal nur eine Entfernung zu dem angefragten Modem bestimmt werden. Für die Unterstützung der AUV-Navigation durch Ranging, werden Transponder genutzt. Dabei handelt es sich um akustische Modems mit Auftriebsschaum, die mit einem Gewicht in einer festen höhe über dem Meeresboden verankert werden, und nach Beedigung des Einsatzes durch das Auslösen des Gewichtes wieder an die Wasseroberfläche treiben. Die AUVs können ihren Abstand zu den Modems über LBL-Ranging bestimmen und die globale Position der Transponder bei den Modems abfragen. Mit Hilfe dieser Informationen, kann dann die AUV-Navigation verbessert werden.
BELUGA besteht im Wesentlichen aus einem Backend, dem Frontend mit der Benutzeroberfläche und einem Modul, das auf den jeweiligen Platformen installiert ist. Das Backend stellt den zentralen Kommunikationsknoten dar, der ein- und ausgehende Nachrichten von den Geräten verarbeitet und nach Bedarf weiterleitet. Dabei wird automatisch der optimale Kommunikationskanal zum Gerät ausgewählt, je nachdem, ob sich das Fahrzeug an der Wasseroberfläche (WLAN, Satellit) oder unter Wasser befindet (akustisch). Alle Nachrichten werden im DCCL-Format (Dynamic Compact Control Language) versendet, einem sehr kompakten, standardisierten Nachrichtenprotokoll für Kommunikationskanäle mit einem geringen Datendurchsatz.
Das Frontend ist die grafische Benutzeroberfläche von BELUGA (Abbildung 2), über welche das gesamte Gerätenetzwerk überwacht und gesteuert werden kann. Hier werden alle Daten zusammengeführt, übersichtlich dargestellt und die Positionen der Fahrzeuge zusammen mit weiteren Informationen (Wetter, Bathymetrie, Ozeandaten) in einer Karte visualisiert. Dies ermöglicht den Anwendern, die aktuelle Situation im und über Wasser mit einem Blick zu erfassen und die einzelnen Fahrzeuge zu steuern.
Die Verwendung der Marke BELUGA erfolgt mit freundlicher Genehmigung der Martin Schönbeck Beratungen GmbH, Spenge.