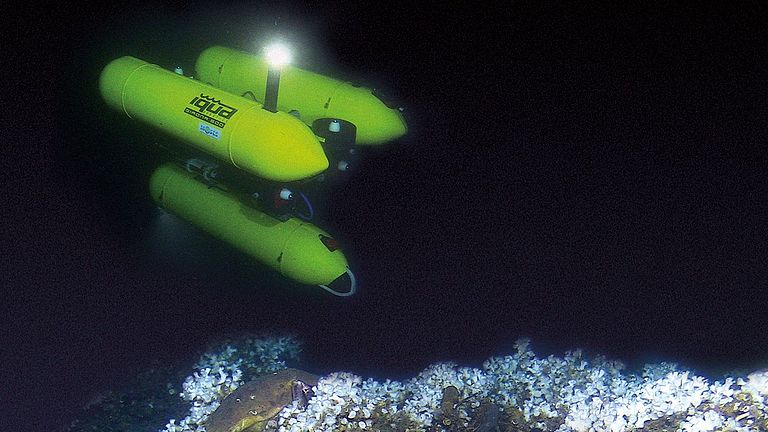
Autonome Unterwasserfahrzeuge (kurz AUVs, von engl. autonomous underwater vehicle) sind unbemannte Tauchfahrzeuge, die eigenständig Aufgaben unter Wasser ausführen. Foto: JAGO-Team/GEOMAR
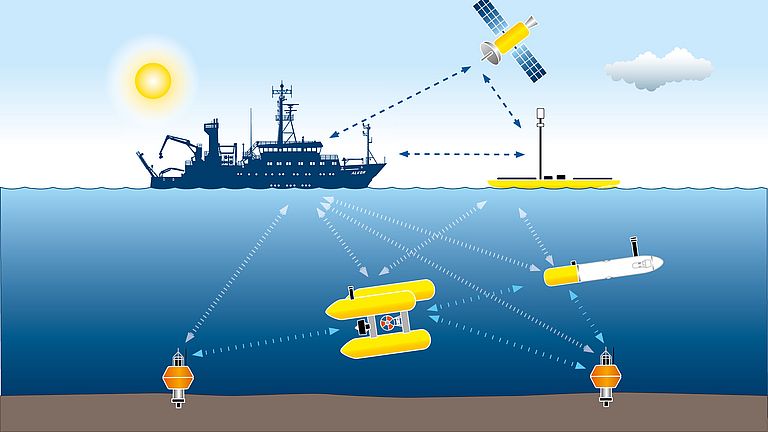
Im Gegensatz zu ferngesteuerten Unterwasserfahrzeugen, wie ROVs (engl. remotly operating vehicel), arbeiten sie völlig autonom, das heißt unabhängig vom Trägerschiff und ohne Kabel. Foto: Nikolas Linke
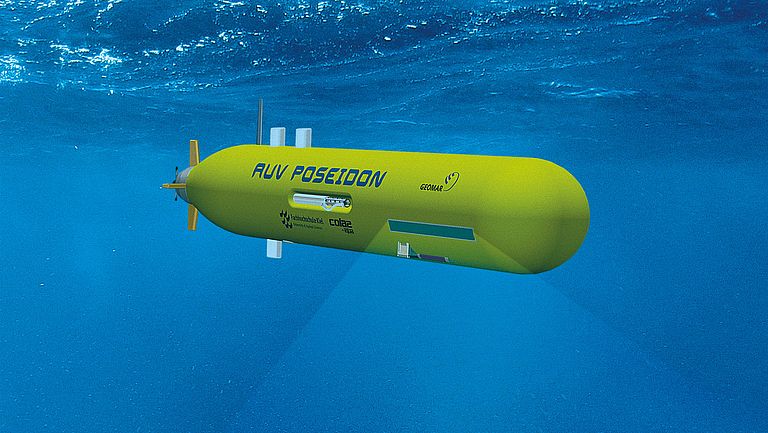
AUVs sind im Allgemeinen torpedoförmig und werden von einem Propeller am Heck angetrieben. Das gilt für die meisten dieser Unterwasserroboter, die in der Mehrzahl für den Einsatz im Flachwasser (bis 500 m) ausgestattet sind. Foto: Nico Augustin/GEOMAR
AUV - Autonome Unterwasserfahrzeuge
Der Großteil der AUVs kann bis zu einer Wassertiefe von 100 Metern tauchen. Es werden aber auch AUVs gebaut, die eine Wassertiefe von bis zu 6000 m erreichen können. Die Tauchzeiten reichen von Stunden und Tagen bis zu mehreren Monaten im Fall der sogenannten Glider. Diese autonomen Fahrzeuge ermöglichen den Zugang zu Meeresregionen, die mit herkömmlichen Geräten kaum erreichbar sind. In einigen Regionen finden keine Forschungsexpeditionen statt, da die Wetterverhältnisse zu gefährlich für Mensch und Material sind.
Für alle AUVs gilt: Ihnen wird eine Mission vorgegeben, anhand derer sie selbstständig nacheinander verschiedene Wegpunkte abfahren, in verschiedenen Wassertiefen oder verschiedenen Höhen über Grund. An den Wegpunkten und auf dem Weg dazwischen können unterschiedliche, ebenfalls vorprogrammierte, Messungen durchgeführt werden. Am Ende einer Mission wird das AUV dann an einem ebenfalls vorprogrammierten Treffpunkt vom Mutterschiff aufgenommen.
Je nach Bauform und Größe können in die AUVs eine Vielzahl unterschiedlicher Sensoren integriert werden. Am GEOMAR werden die AUVs in erster Linie für das Kartieren des Meeresbodens eingesetzt. Also sind die Fahrzeuge dementsprechend mit Fächerecholoten oder Seitensichtsonaren für das akustische Kartieren oder Kameras für das optische Kartieren ausgestattet.
 sind unbemannte Tauchfahrzeuge, die eigenständig Aufgaben unter Wasser ausführen.")
, arbeiten sie völlig autonom, das heißt unabhängig vom Trägerschiff und ohne Kabel.")
 ausgestattet sind.")