Diese Seite wird gerade überarbeitet. Bei Fragen zu BELUGA melden Sie sich gerne bei uns.
BELUGA Kommunikations- und Positionierungsplattform
BELUGA ist ein System zur Anzeige und Überwachung von Plattformen und deren Messdaten bei Einsätzen auf See in Echtzeit. Über eine Benutzeroberfläche (BELUGA Navigator) werden von den Plattformen empfangene Daten mit Positionen dargestellt. Dabei können Daten direkt an Bord angezeigt, sowie zusätzlich in einer online einsehbaren Oberfläche in nahezu Echtzeit verfügbar gemacht werden. Neben der Visualisierung von Daten kann über BELUGA mit Plattformen über und unter Wasser kommuniziert werden.
Die Funktionalitäten von BELUGA werden im Abschnitt Funktionen genauer erläutert.

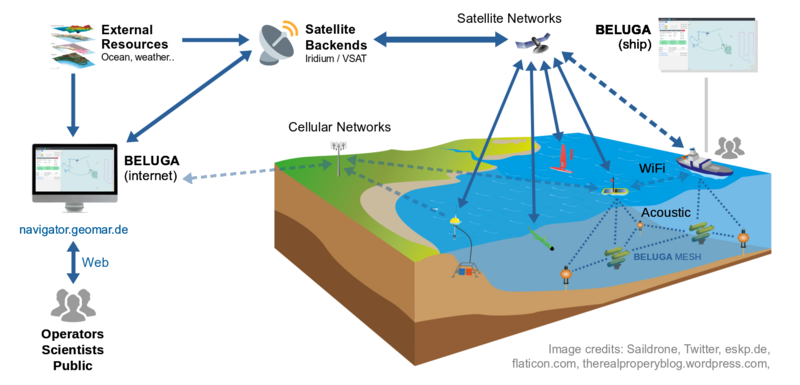
Abbildung 1 zeigt die verschiedenen Datenflüsse, die innerhalb des BELUGA Systems genutzt werden können. Je nach Plattformen und Einstellungen werden unterschiedliche Kommunikationskanäle genutzt. Während bei einem Einsatz auf See oft akustisch oder per WLAN mit eingesetzten Plattformen kommuniziert wird, senden andere Plattformen, die länger im Wasser bleiben, ihre Daten auch über Satellite. Neben der Anzeige der eingegangenen Daten direkt an Bord, in der Grafik dargestellt als BELUGA (ship), können die Daten zusätzlich in der öffentlich erreichbaren Version der Benutzeroberfläche, hier: BELUGA (internet), visualisiert werden. Auch die Darstellung von Daten ausschließlich in der öffentlichen Version, ohne lokales BELUGA Netzwerk an Bord, ist möglich. Zusätzlich können externe Daten, die über das Internet abgerufen werden, sowohl lokal als auch öffentlich angezeigt werden.
Begriffe
An dieser Stellen werden einige Begriffe, die im BELUAG Kontext verwendet werden, kurz erläutert:
- BELUGA Navigator
Die Benutzeroberfläche von BELUGA, aufgebaut als Webanwendung. - Plattform
Als Plattform werden alle eigenständig darzustellenden Geräte, denen mindestens Positionsdaten zugeordnet sind, eingestuft. So ist beispielsweise ein Autonomes Unterwasserfahrzeug (AUV) eine Plattform, aber auch ein Schiff, von dem aus das AUV eingesetzt wird ist eine Plattform. - Kampagne
Eine Kampagne bezeichnet hier eine Einheit, in der Plattformen und Daten zusammengefasst werden. Eine Ausfahrt kann beispielsweise als Kampagne in BELUGA abgebildet werden, aber auch Messkampagnen oder mehrere zusammenhängende Geräteeinsätze können in einer Kampagne dargestellt werden. - Projekt
Projekte sind Kontexte, denen eine Kampagne zugeordnet werden kann. Sie werden nicht explizit dargestellt, können aber im Zusammenhang mit einer für weiterführende Informationen verlinkt werden. Zu einem Projekt können grundsätzlich mehrere Kampagnen gehören.
Funktionen von BELUGA
Die Funktionalitäten von BELUGA lassen sich in die Bereiche "Überwachung und Steuerung von Plattformen", "Datenvisualisierung" und "Öffentlichkeitsarbeit" einteilen.
Plattform Überwachung und Steuerung
- Kommunikation mit Plattformen über und unter Wasser
Durch das Empfangen und Anzeigen von Statusinformationen oder Messwerten können Einsätze verfolgt und gegebenefalls auf Ereignisse reagiert werden (beispielweise durch das Senden eines Auftauch-Befehls). - Automatische Wahl des Kommunikationskanals
Wenn eine Nachricht (beispielsweise ein Befehl) an eine Plattform gesendet werden soll, entscheidet BELUGA selbstständig, über welches Medium (z.B. Akustik oder WiFi) die Nachricht gesendet wird. - Darstellung von Plattform-Positionen in der Karte
In der Karte werden die globalen Positionen der eingebundenen Plattformen angezeigt, wodurch auch Einsätze mit mehren Plattformen übersichtlich bleiben. Eine Messfunktion in der Karte erlaubt es zusätzlich, die Abstände der Plattformen zueinander zu bestimmen. - Angepasste Dashboards pro Plattformtyp
Individuelle Dashboards bieten je nach Plattform unterschiedliche Optionen an. So ist die Darstellung spezifischer Informationen sowie eine auf die Plattform angepasste Auswahl an Aktionen möglich. - Positionierung
Mit Hilfe eines Evologics USBL können die Positionen integrierter Plattformen von der Basis aus bestimmt und diese an die Plattform gesendet werden (siehe Positionierung).
Datenvisualisierung
- Echtzeit-Übersicht über aufgenommene Daten an Bord
Durch die Anzeige der Plattformen in der Karte und der übertragenen Messwerte, entsteht eine Übersicht der aufgezeichneten Daten in im jeweiligen Gebiet. - Anzeige von Daten als Chart
Neben der Anzeige der zuletzt übertragenen Daten einer Plattform, kann jeder Parameter als Graf eingeblendet werden. Zusätzlich wird der Track der Plattform in der Karte entsprechend der Legende des Parameters eingefärbt. - Einbindung externer Daten in die Karte
Daten können als auswählbare Overlays in die Karte integriert werden. Auf diese Weise können beispielsweise durch Modelle erstelle oder von Satelliten aufgezeichnete Daten in BELUGA integriert werden. Beispiele dafür sind Bathymetrie- oder Winddaten. - Daten-Export
Bei vollständig integrierten Plattformen kann auch das Runterladen und Aufbereiten der Daten eines Tauchgangs über BELUGA automatisiert erfolgen. Dabei werden die Daten gemäß mit dem Datenmanagement abgestimmter Standards und Formate für die Ablage prozessiert. Teil des Prozesses ist auch, falls die nötigen Informationen im System gepflegt wurden, automatisch einen Bericht der exportierten Mission zu erstellen.
Öffentlichkeitsarbeit
Zusätzlich zu dem jeweils bei den Einsätzen vor Ort genutzten System, gibt es eine öffentliche Version des BELUGA Navigators, die online einsehbar ist.
Diese ist zu erreichen unter: https://beluga.geomar.de
- Darstellung von Kampagnen
In BELUGA laufende Kampagnen können optional für die online Variante freigeschaltet werden. Dadurch können Ausfahrten sowohl von Wissenschaftlern sowie anderen Interessierten online mitverfolgt werden. Die Anzeige ist dabei die selbe, wie bei dem Schiffs-System, nur dass online keine Interaktion mit den Plattformen möglich ist. - Medien-Feed
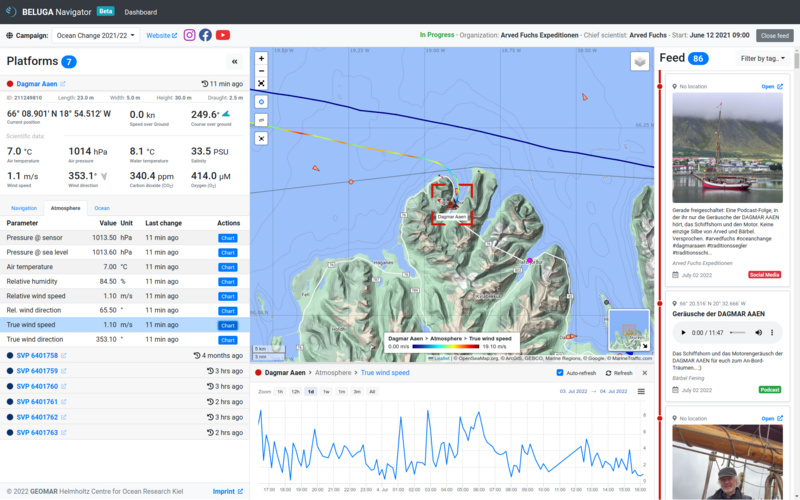
Neben der Anzeige von Plattformen und deren Daten, kann in der online Variante von BELUGA ein Feed angezeigt werden, in dem beispielweise Berichte von Bord oder Erläuterungen von Daten verlinkt werden. Die Einträge des Feeds könne über die Angabe von Koordinaten bestimmtne Punkten in der Karte zugeordnet werden. Die Feeds für die Kampagnen werden, basierend auf angegebenen URLs (Blogs, soziale Medien) automatisch generiert.
Geplante Funktionen
- Missionsplanung
Zukünftig soll es möglich sein, für vollständig in BELUGA integrierte Plattformen, Missionen im BELUGA Navigator zu planen und zu erstellen. - Annotations-/Logbuchfunktionen in der Benutzeroberfläche
Es soll möglich sein Ereignisse im BELUGA Navigator zu dokumentieren, markieren oder zuzuordnen basieren auf Informationen über Zeit, Position, Kampagne, Plattform und/oder Mission. Dadurch soll unter anderem die automatische Erstellung von Missionsbericht ausgebaut werden. - Integration weiterer Plattformen
- Integration weiterer Kommunikationskanäle
- Benutzerverwaltung
Um nach dem Ausbau des Systems Funktionen oder Daten (beispielsweise die Steuerung bestimmter Plattformen) nur ausgewählten Personen zugänglich zu machen, soll eine Benutzerverwaltung mit Rollenverteilung eingeführt werden.
BELUGA Navigator
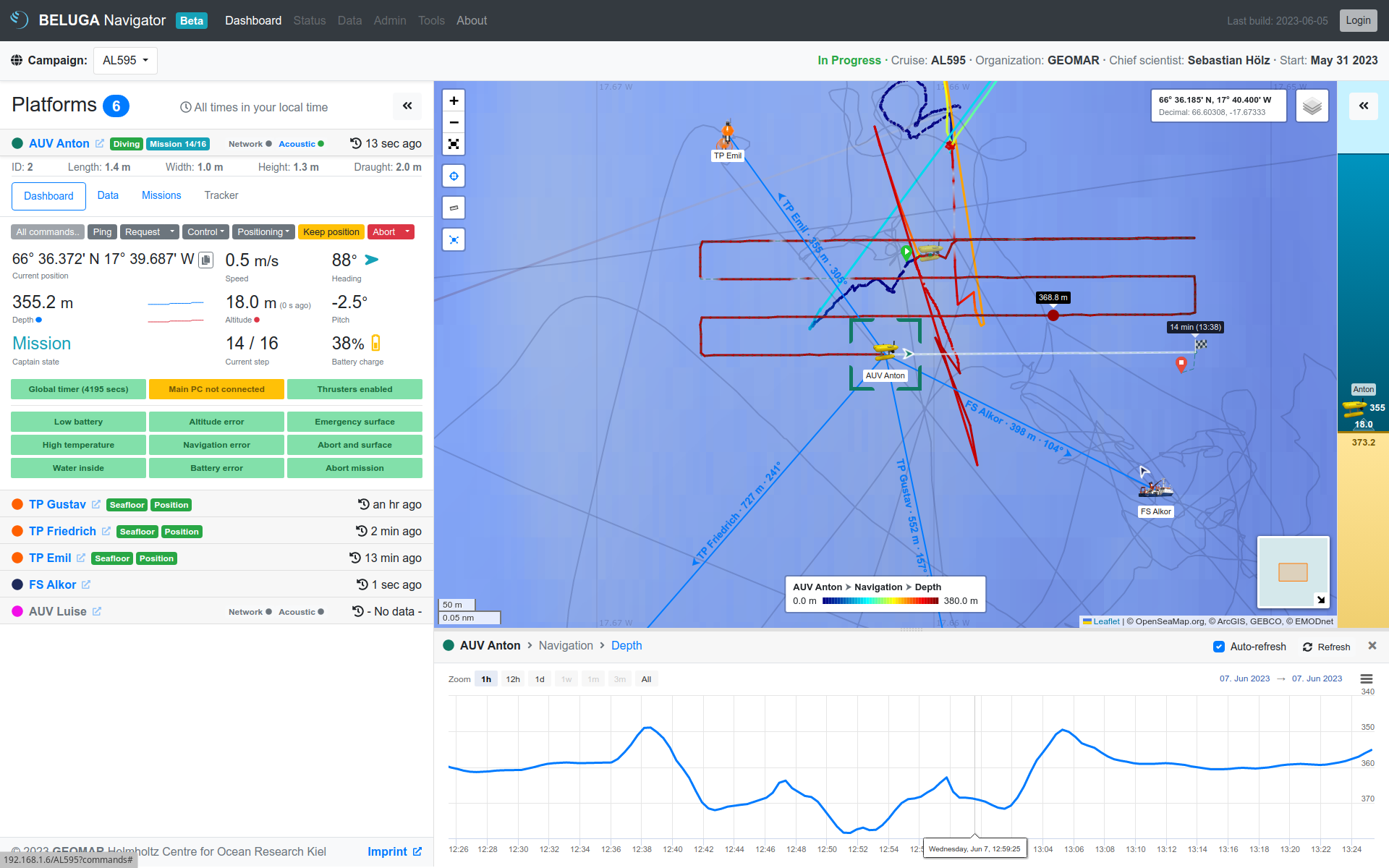
Die Benutzeroberfläche von BELUGA ist sowohl online als auch im lokalen System die selbe. Sie ist als Webanwendung aufgebaut und kann über einen beliebigen Browser geöffnet werden. Die Website besteht aus mehreren Komponenten, wovon einige nach Bedarf erscheinen und verschwinden. Neben einer Navigationsleiste am oberen Fensterrand, befindet sich auf der linken Seite immer eine Liste mit Plattformen, während der mittlere und rechte Bereich des Fensters von einer Karte eingenommen wird. Zusätzliche Komponenten erscheinen am rechten und unteren Rand des Fensters. Im Folgenden werden alle Komponenten des BELUGA Navigators beschrieben. Eine erste Übersicht kann in Abbildung 2 gefunden werden.

BELUGA Navigator Komponenten
- Navigationsleiste
Am oberen Bildschirmrand befindet sich eine Leiste mit Informationen und weiterführende Links zu der aktuell ausgewählten Kampagne. In einem Dropdown-Menü kann eine andere Kapagne gewählt werden. - Plattform-Liste
Alle zur Kampagne gehörenden Plattformen werden in einer Liste am linken Bildschirmrand dargestellt. Durch Klicken kann eine Plattform angewählt werden, woraufhin deren Listenelement aufklappt und Informationen über die Plattform anzeigt. Da je nach Art der Plattform die zur Verfügung stehenden Informationen variieren, werden plattformspezifische Listenlemente mit angepasstem Layout verwendet. - Karte
Einen großen Teil der Oberfläche nimmt eine Karte ein, auf der die Positionen aller zur Kampagne gehörenden Plattformen angezeigt wird. Für die Karte stehen mehrere Overlays zur Verfügung, über die beispielsweise externe Daten wie Wind oder Bathymetrien eingeblendet werden können. Diese können über einen Button in der oberen rechten Kartenecke ein- und ausgeblendet werden können. Am linken Rand der Karte stehen Buttons für Zoom- und Messfunktionen zur Verfügung. - Medien-Feed (optional)
Wenn für die gewählte Kampagne ein Feed angelegt wurde, ist dieser am rechten Bildschirmrand zu sehen (siehe Abbildung 2). Zur Vergrößerung der Kartenfläche, kann der Feed einfach über einen Button in der Navigationsleiste ausgeblendet werden. In dem Feed werden Beiträge aus verschiedenen Quellen (beispielsweise Blogs, Podcasts, Youtube oder Social Media) eingeblendet und mit einem Fähnchen in der Karte verlinkt, falls eine Position zum Eintrag verfügbar ist. - Chart-Viewer (optional)
Die Daten der Plattformen können durch einen Klick auf den Button "Chart" hinter dem jeweiligen Parameter in der Plattformliste, grafisch in einem Chart dargestellt werden. Das Fenster für die Anzeige öffnet sich dann am unteren Bildschirmrand (siehe Abbildung 2). In dem Fenster kann der Zeitraum ausgewählt werden, für den der Wert des gewählten Parameters angezeigt werden soll. Durch einen Klick auf "X" kann das Fenster wieder geschlossen werden, sodass die Karte wieder mehr Raum einnehmen kann. - Tiefen-Anzeige (optional)
Wenn Plattformen, die ihre aktuelle Tiefe und Altitude übermitteln, an der Kampagne beteiligt sind, erscheint am rechten Bildschirmrand (in dem Bereich, in dem ggf. der Feed erscheint) eine Tiefenanzeige, in der die Plattformen in der Wassersäule dargestellt werden (siehe Abbildung 3).
{kind=link}
{kind=link}
{kind=link}
Schnittstellen und Kommunikation
In diesem Abschnitt wird auf die für die Kmmunikation im lokalen BELUGA Netzwerk genutzten und Integrierten Schnittstellen und Geräte eingegangen. Im lokalen BELUGA System ist nicht nur die Anzeige von Daten, sondern auch das Senden von nachrichten an dei Plattformen möglich. Plattformen, die ihre Daten über Sattelitenverbindungen an einen Server schicken, von dem aus die in das BELUGA System gelangen und angezeigt werden können, werden hier nicht berücksichtigt, da diese Kommunikationswege je nach Art der Plattform unterschiedlich sind, alle Daten aber in einer Datenbank des GEOMAR Datenmanagement zusammenlaufen, von wo BELUGA sie abholt. Anschließend wird auf das Protokoll für die lokale Kommunikation eingegangen.
Schnittstellen
Um ein lokales BELUGA System zu nutzen, kommt eine Shipboard-Konsole mit der Hardware für das System zum Einsatz. Diese beinhaltet unter Anderem zwei Rechner, auf denen BELUGA selbst und zusätzliche Module laufen. Neben einem Router ist auch ein Datenspeicher Teil des Systems. BELUGA entscheidet selbstständig, welcher der zur Verfügung stehenden Kommunikationskanäle genutzt wird, um eine Nachricht an eine Plattform zu senden. Kommunikation ist aktuell über die Schnittstellen möglich:
- Netzwerk
Über den Router der Shipboard-Konsole wird ein lokales Netzwerk aufgespannt, über das Plattformen per WLAN kommunizieren können. Auch die Anbindung über Ethernet, beispielsweise zum Runterladen von Daten, ist möglich. - Akustisches Modem (Evologics 18/34)
Über ein akustisches USBL-Modem von Evologics kann unter Wasser mit Plattformen kommuniziert werden.
Kommunikation
Die Kommunikation im lokalen BELUGA System basiert auf Nachrichten im DCCL Format. Es werden unabhängig von der genutzten Schnittselle die selben Nachrichten versendet.
Navigation und Positionierung unter Wasser
Ein Bereich von BELUGA ist die Navigation unter Wasser. Aktuell wird hier für und mit den autonomen Unterwasserfahrzeugen (AUVs) des GEOMAR entwickelt und getestet.
Der Fokus liegt dabei zur Zeit auf einer Verbesserung der AUV-Navigation während Missionen. In diesem Bereich werden sowohl USBL-Positionierung als auch LBL-Ranging untersucht, wobei im Einsatz bisher vorwiegend mit USBL-Positionierung gearbeitet wird.
Beide Techniken werden im Folgenden vorgestellt:
USBL-Positionierung
Über das akustische USBL-Modem von Evologics kann die Position einer Plattform unter Wasser bestimmt werden. Dazu schickt das USBL-Modem am Schiff ein Signal an das Modem der Plattform, dessen Position bestimmt werden soll und das Modem an der Plattform antwortet auf die Nachricht. Basierend auf der Richtung, aus der die Antwort kam und der Zeit, die seit dem Senden des Signal vergangen ist, kann dann die Position der Plattform berechnet werden. Diese Positionsbestimmung durch "anpingen" eines Modems ist für alle Plattformen, die über ein Evologicsmodem für den passenden Frequenzbereich verfügen, möglich.
Das BELUGA System an Bord erhält die Informationen vom Modem und sendet dann die berechneten Positionen nach einer Plausibilitätsprüfung, bei der ausreißende Positionen rausgefiltert werden, an die jeweilige Plattform. Die AUVs können die empfangene Positionsinformation an ihre interne Navigationseinheit weiterleiten, was eine Stützung der AUV-Navigation, insbesondere wenn keine anderen Navigationsinformationen zur Verfügung stehen, erlaubt.
LBL-Ranging
Auch diese Technik basiert auf den akustischen Modems und wird von allen Evologics Modems unterstützt. Ähnlich wie bei der Positionierung über USBL, wird vom Modem ein Signal ausgesendet und die Zeit bis zur Antwort gemessen. Anders als das am Schiff genutzte USBL-Modem, sind einfachere Modems, wie sie an den AUVs genutzt werden, nicht USBL-fähig. Sie können also nicht bestimmen, aus welcher Richtung ein akustisches Signal kam. Aus diesem Grund kann basierend auf dem Antwortsignal nur eine Entfernung zu dem angefragten Modem bestimmt werden. Für die Unterstützung der AUV-Navigation durch Ranging, werden Transponder genutzt. Dabei handelt es sich um akustische Modems mit Auftriebsschaum, die mit einem Gewicht in einer festen höhe über dem Meeresboden verankert werden, und nach Beedigung des Einsatzes durch das Auslösen des Gewichtes wieder an die Wasseroberfläche treiben. Die AUVs können ihren Abstand zu den Modems über LBL-Ranging bestimmen und die globale Position der Transponder bei den Modems abfragen. Mit Hilfe dieser Informationen, kann dann die AUV-Navigation verbessert werden.